提供視覺系統(tǒng)整體解決方案
About us
honor certificate
Partner
Video center
Recruitment
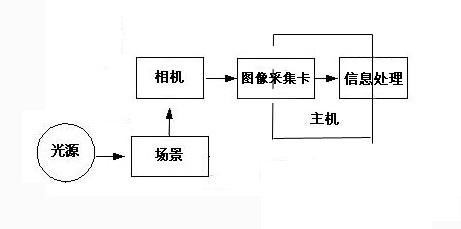
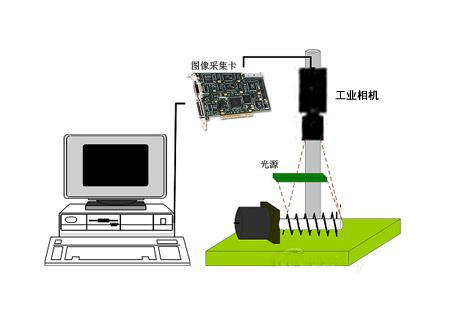
visual system
Barcode reader
Accessories
Laser measurement
sport control
visual inspection equipment
Deep learning
Automobile industry
Consumer Goods Industry
Electronics industry
Food Industry
logistics industry
Pharmaceutical industry
Packaging industry
Download Center
Product Demo
Get products
Company dynamics
Industry Information
Exhibition Center
18998033070
信息來源于:互聯(lián)網(wǎng) 發(fā)布于:2021-07-31
咨詢熱線
郵箱
marketing@slvt.cn
微信號
slv4008003378
手機(jī)站
手機(jī)網(wǎng)站
公眾號
微信公眾號
回頂
<fieldset id="m0cwo"></fieldset>